

Avevamo parlato qualche tempo fa di micro-robot simili ad origami, che vantavano la capacità di piegarsi e ripiegarsi.
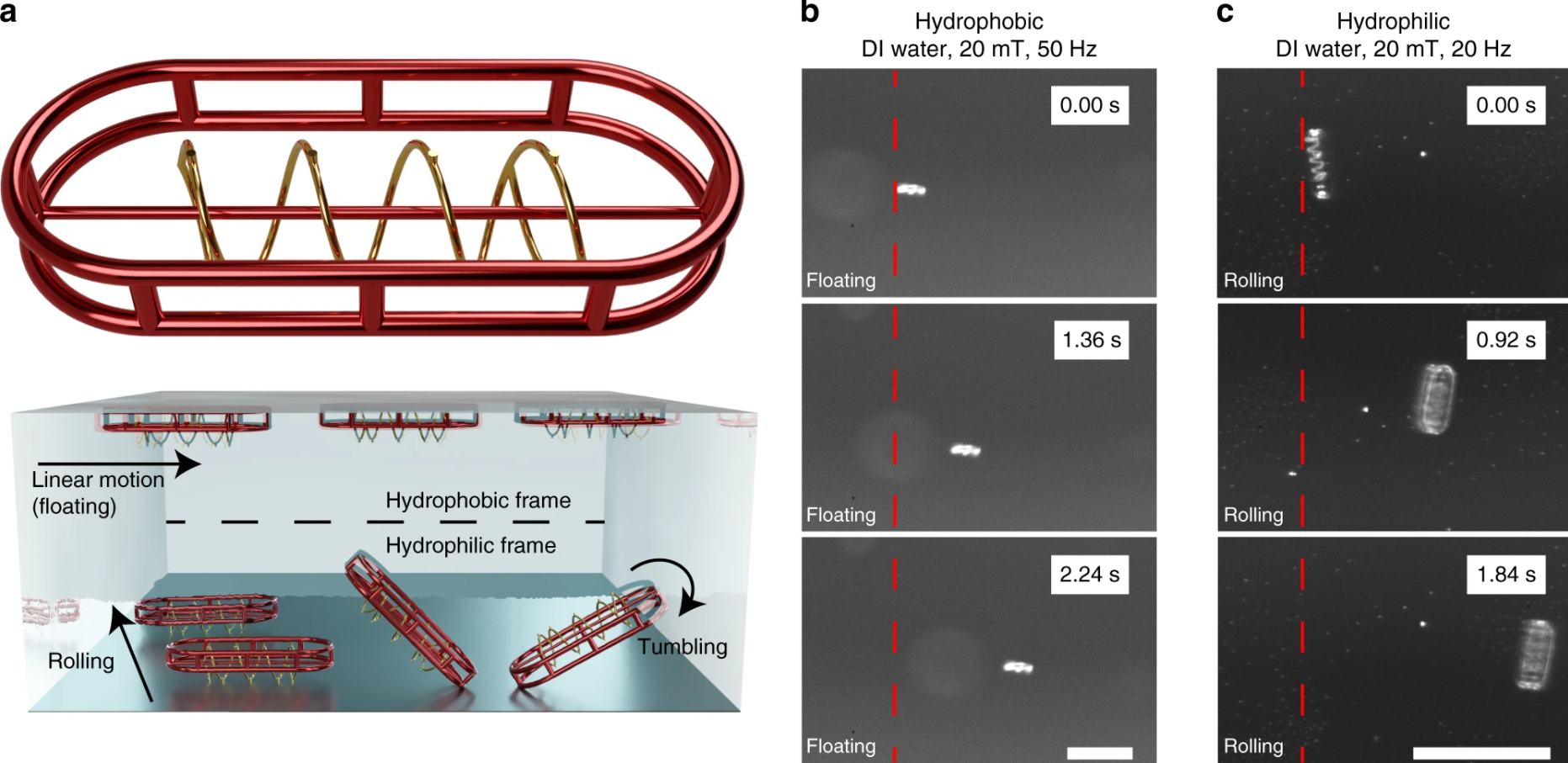
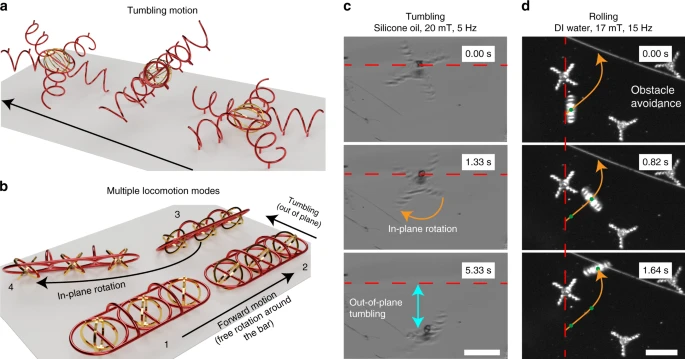
Quelli di cui tratteremo oggi, differiscono principalmente per la tecnologia utilizzata per produrli. Grazie all’esperienza del Professor Salvador Pané, unita alla collaborazione tra ricercatori appartenenti a differenti ambiti disciplinari (ingegneri elettrici, ingegneri meccanici, chimici e scienziati dei materiali), è stata utilizzata una tecnica di stampa 3D ad altissima precisione, in grado di produrre oggetti complessi a livello micrometrico.
Si tratta di una tecnica nota come litografia 3D, che consiste nel produrre una sorta di stampo costituito da minuscole scanalature che fungono da “negativo” e possono essere riempite da materiali selezionati, mediante deposizione elettrochimica. Lo “stampo” viene poi dissolto con l’utilizzo di solventi.
L’obiettivo a cui i ricercatori lavorano da anni, è la realizzazione di robot così piccoli da potersi muovere all’interno dei vasi sanguigni o di poter andare da un punto all’altro del corpo umano per somministrare un farmaco.
La combinazione di metalli e polimeri del micro-robot svizzero, in stretta connessione tra loro, consente di poter beneficiare delle proprietà dell’uno e dell’altro materiale. I polimeri, ad esempio, godono del vantaggio di poter essere utilizzati per la costruzione di componenti morbide e flessibili, così come per la costruzione di sezioni in grado di dissolversi all’interno del corpo. Se si incorporasse poi un farmaco in questo tipo di polimero solubile si potrebbe andare a somministrarlo in un punto ben determinato del corpo umano.
La ricerca, pubblicata sulla rivista Nature Communications, intende ora aprire a due nuove direzioni di indagine. Da un lato un perfezionamento di quanto realizzato, sino a giungere a micro-robot in grado di piegarsi, aprirsi e chiudersi in autonomia. Non più soltanto quindi andare a fornire farmaci in punti ben localizzati, ma anche, ad esempio, muoversi e poi procedere al trattamento di aneurismi o eseguire operazioni chirurgiche. Dall’altro lato, sugli stessi principi su cui si basano questi micro-robot, si vuole andare a realizzare stent in grado di aprirsi e posizionarsi in punti specifici.
Fonte
Alcântara CCJ, Landers FC, Kim S, De Marco C, Ahmed D, Nelson BJ, Pané S: Mechanically Interlocked 3D Multi-Material Micromachines, Nature Communications, 24 novembre 2020, doi: 10.1038 / s41467-020-19725-6