


Come perfezionare il volo di un drone se non prendendo esempio dalla natura? Il team di EPFL per realizzare un nuovo modello, ha scelto infatti di ispirarsi alla conformazione e alle modalità di movimento dell’astore, un uccello rapace.
Gli scienziati del Laboratory of Intelligent Systems guidato da Dario Floreano hanno osservato i comportamenti dell’uccello e hanno progettato un oggetto con caratteristiche simili. Come l’astore muove coda e ali in modo coordinato per eseguire movimenti precisi, così si comporta il drone dalla forma di rapace.
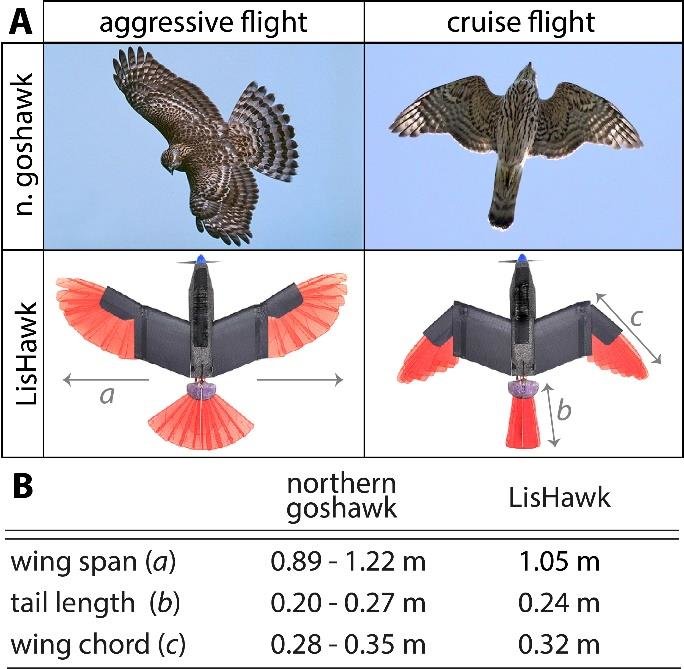
Il nuovo drone possiede infatti una coda piumata in grado di cambiare conformazione coordinandosi con le ali, in funzione delle necessità. Il primo progetto di ala in grado di trasformarsi risale al 2016, ma il recente modello vanta una mobilità molto più evoluta grazie alle piume artificiali.
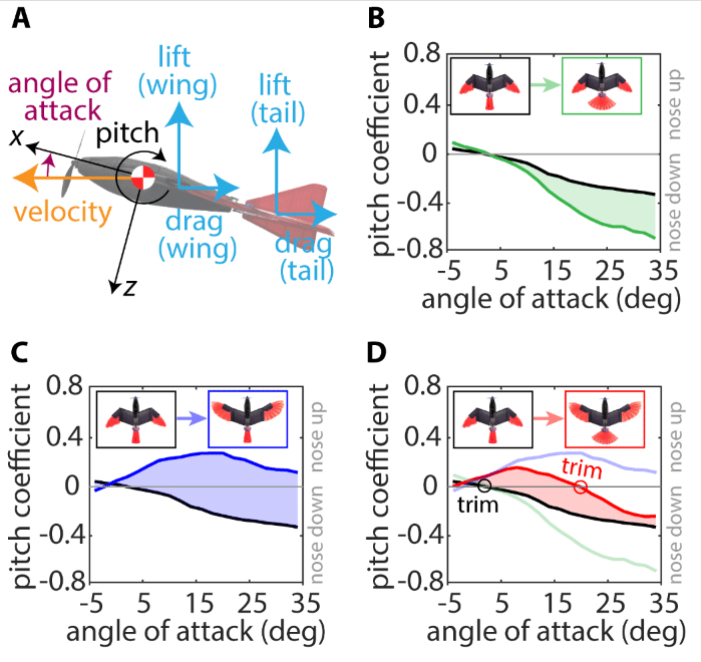
La possibilità di ali e coda di mutare forma coordinandosi permette al drone di mettere in atto movimenti più precisi rispetto ad altri modelli: cambi di direzione repentini, migliore performance contro la resistenza dell’aria, voli più lenti senza perdere quota.
Il vantaggio maggiore del drone alato sui simili quadrirotori è la capacità di volare più a lungo a parità di peso. Uno svantaggio è che i secondi possono librarsi sul posto e compiere curve più strette rispetto al modello del team EPFL. “Il drone appena progettato si colloca da qualche parte nel mezzo. Può volare a lungo ed è quasi agile quanto i quadrirotori” afferma Floreano.
Le peculiarità del drone EPFL lo rendono il modello ideale per l’impiego nelle foreste e fra gli alti edifici cittadini. Ma, data la difficoltà di manovrare manualmente l’ampia varietà di combinazioni fra ali e coda, per sfruttarne pienamente le potenzialità il team ha in mente di incorporare all’oggetto l’intelligenza artificiale.
Enrico Ajanic, Mir Feroskhan, Stefano Mintchev, Flavio Noca, D. Floreano sono gli autori della ricerca “Bioinspired wing and tail morphing extends drone flight capabilities”, pubblicata su Science Robotics, 5, eabc2897 (2020). Lo studio è stato realizzato con il supporto di NCCR Robotics.